Para probar diseñamos una estructura tipo cruz con madera, realizando un agujero para colocar los motores.

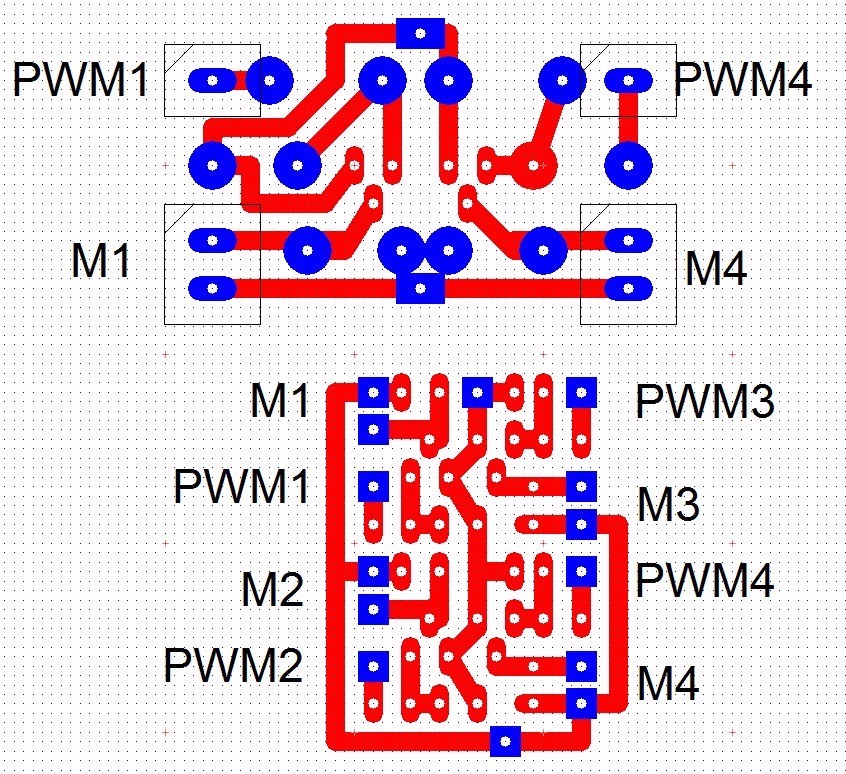
También por una cuestión de peso general del proyecto y espacio físico, re diseñamos la placa de control de potencia de los motores, haciéndola mas chiquita y liviana, utilizando todos componentes SMD. A continuación mostramos una captura del diseño original de la placa para el control de 2 motores y la que diseñamos para los 4, ademas de como quedo el impreso.

Luego colocamos esta placa y la unimos a los motores:


Colocamos luego la placa de control, el conector de la batería y conectamos todos los cables.

Colocamos la batería, cargamos el programa, del cual hablaremos mas adelante y realizamos la primer prueba de vuelo. el resultado es fue el siguiente:
Obviamente en esta primera prueba, no pudimos hacerlo volar, pero sacamos varias conclusiones:
- El dron es muy pesado para la potencia de los motores, ya que recién puede levantar vuelo con los motores a un 75%.
- Las ganancias que utilizamos para los PID no compensan correctamente el vuelo.
- Los valores del Giroscopio tienen una dispersión y vibraciones muy grandes debido a la ubicación en donde esta colocado.
- La batería nos da unos 10 minutos de autonomía con motores a carga completa.
- El diseño de nuestra estructura es incomodo para realizar pruebas y cambio de Baterias.
No hay comentarios.:
Publicar un comentario